
Score-Based Multibeam Point Cloud Denoising
Published in IEEE/OES Autonomous Underwater Vehicles (AUV) Symposium, 2024
Authors: Li Ling, Yiping Xie, Nils Bore, John Folkesson
Abstract
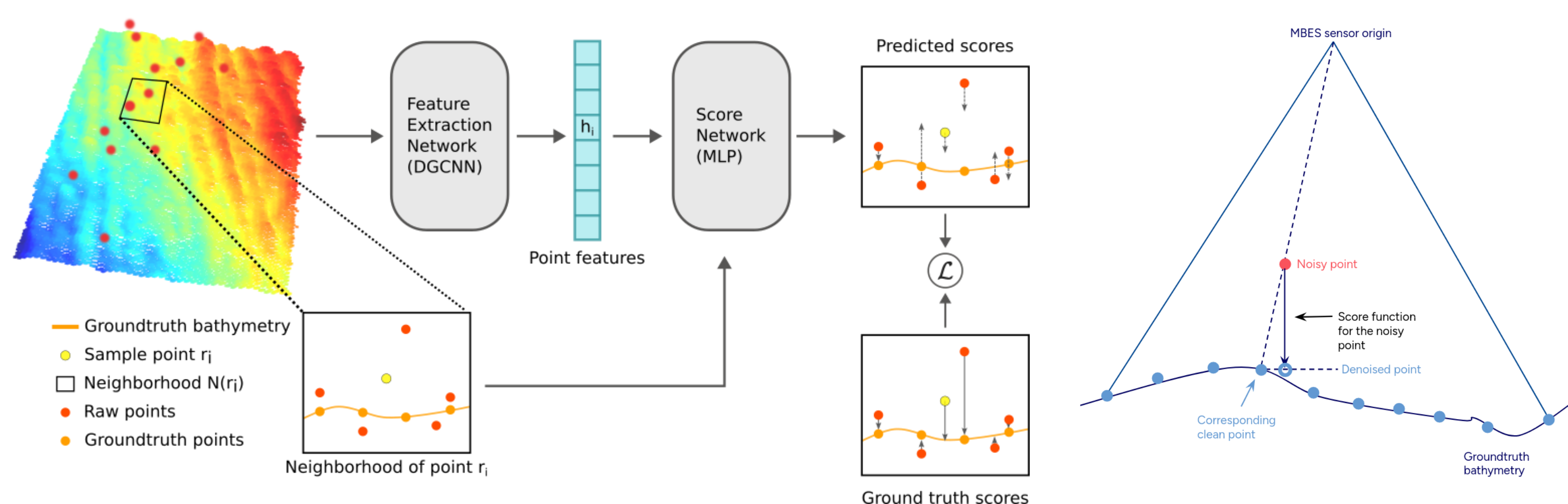
Multibeam echo-sounder (MBES) is the de-facto sensor for seafloor mapping, or bathymetry mapping. In recent years, cheaper MBES sensors and global mapping initiatives have led to exponential growth of available data. However, raw MBES point cloud data contains 1-25% of outliers, which need to be filtered out before an accurate bathymetry can be constructed. Typically, these outliers are handled by semi-automatic cleaning algorithms such as CUBE, with extensive parameter tuning and validation by data processing experts. Such workflow lacks scalability and repeatability. In this work, we draw inspirations from the point cloud denoising community, and propose a score-based multibeam denoising network. In this context, the score refers to the gradient of the log-probability function of the points. The network is trained and tested using real survey data gathered by an autonomous underwater vehicle (AUV). By evaluating on unseen test data, we found that this proposed network outperforms classical methods on both outlier detection and point cloud denoising, and can be readily integrated into existing MBES standard workflows.